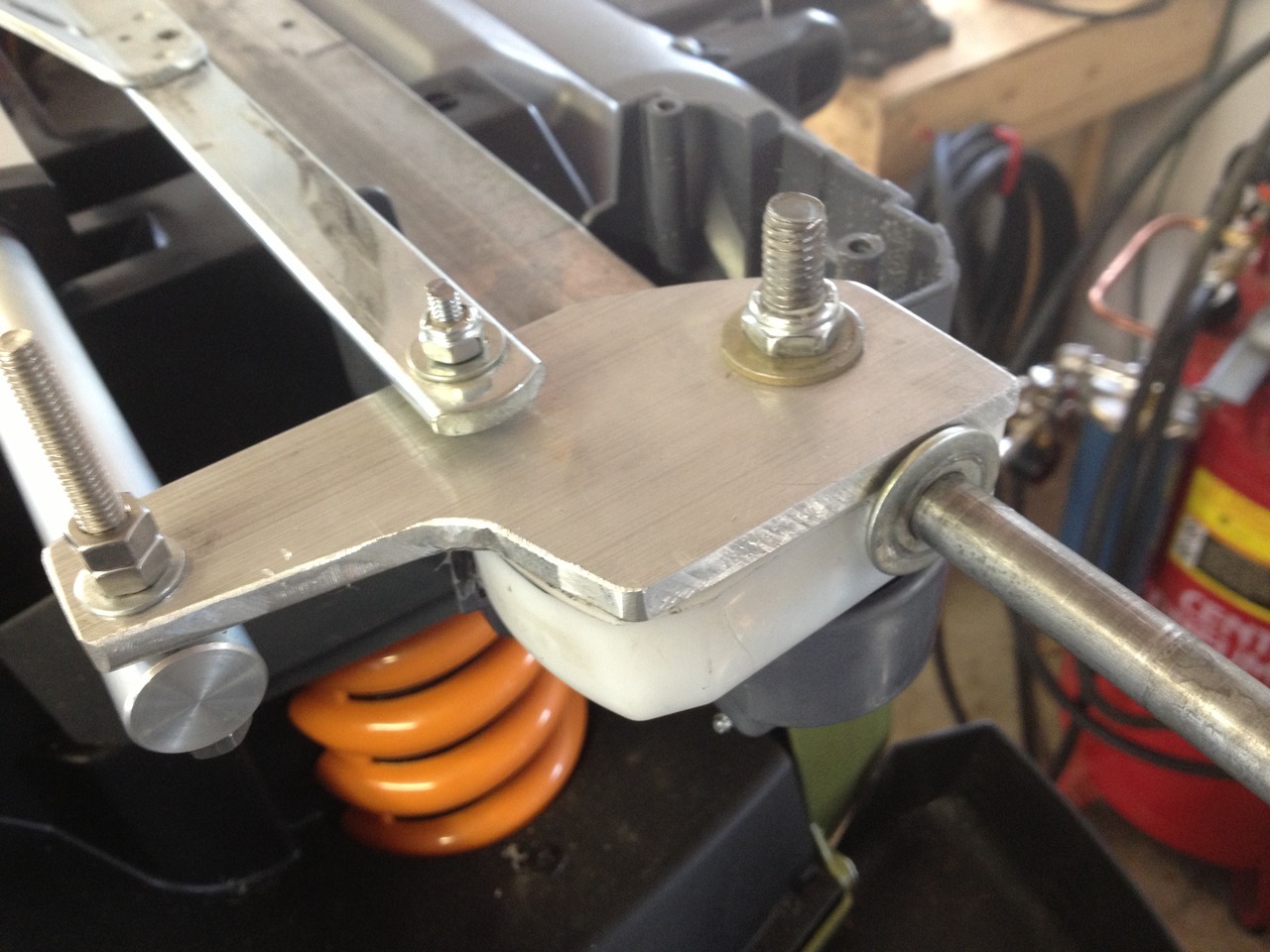
Max has been working on removing the slop from the front end. I guess the amount of slop is acceptable when its using the plastic wheels and slow motors, but as we have ramped everything up and are now using rubber tires the slop has led to some pretty unpredictable
In
Starndard