Cleaned up my QAV500 quadcopter during lunch today.
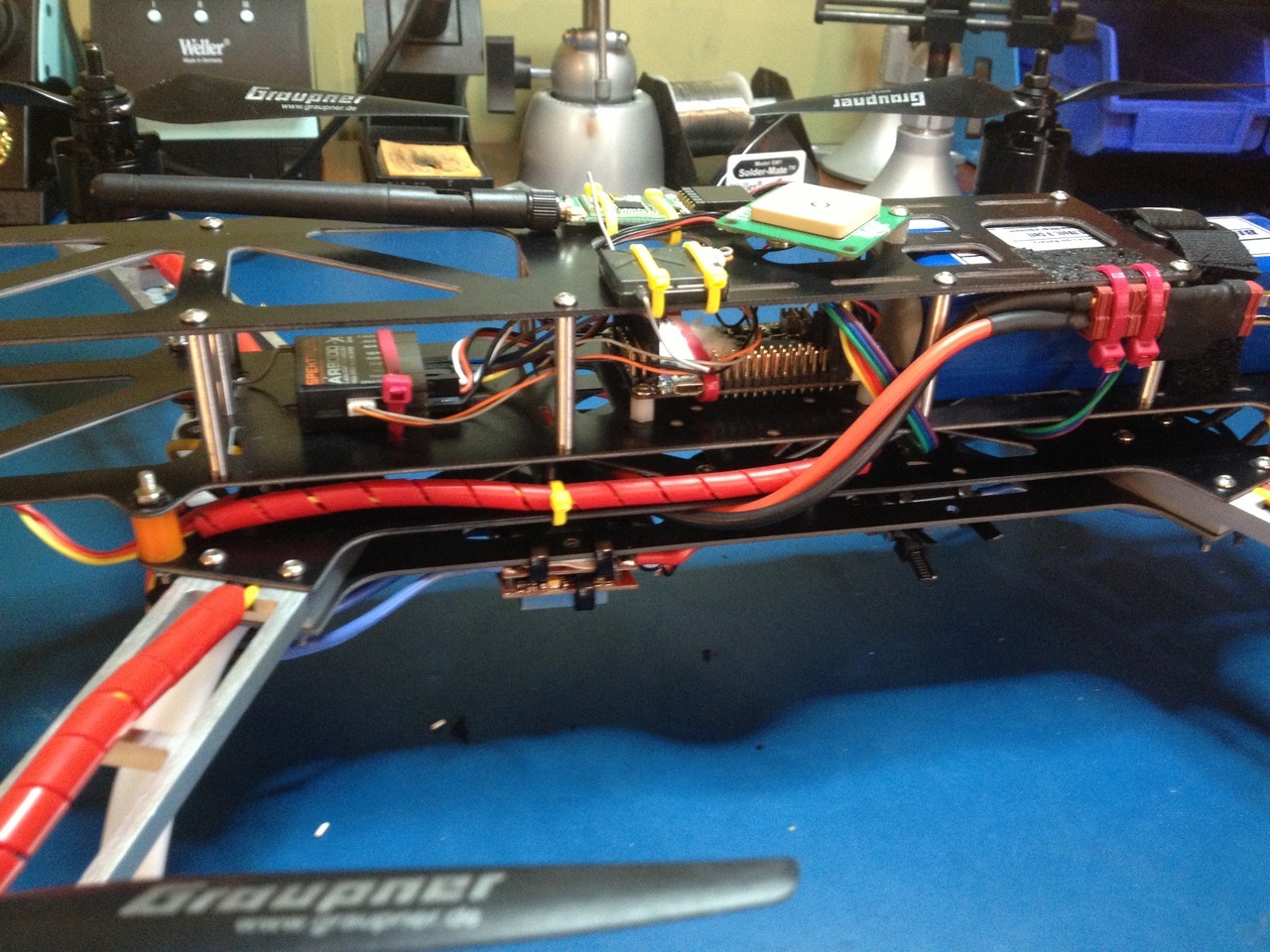
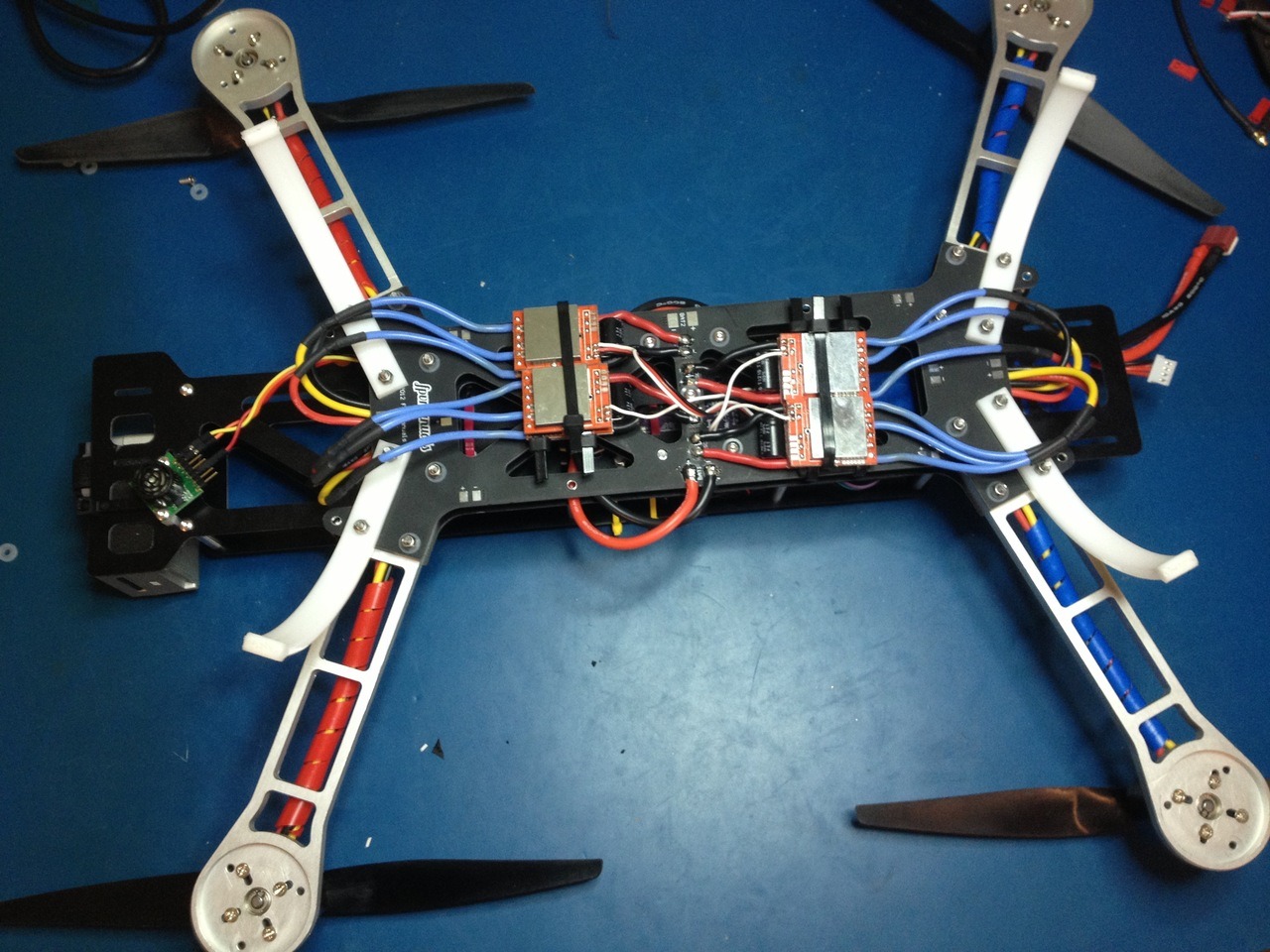
Due to the size of the ESCs I am using (40a 6s capable), they do not fit in the intended space, and Initially I had them between the dirty (where the motors are) and clean (noise isolated for camera/controllers) platforms. However, this meant I had to add extra height between the 2 sections. This had some unintended side effects, the weight sat too high in relation to the props, and when moving forward or backwards it would be very “floppy” (for lack of a better word), it would tend to over pitch.
I have put the ESCs on the underside now, and cleaned up the wiring significantly. Will be testing it tomorrow.