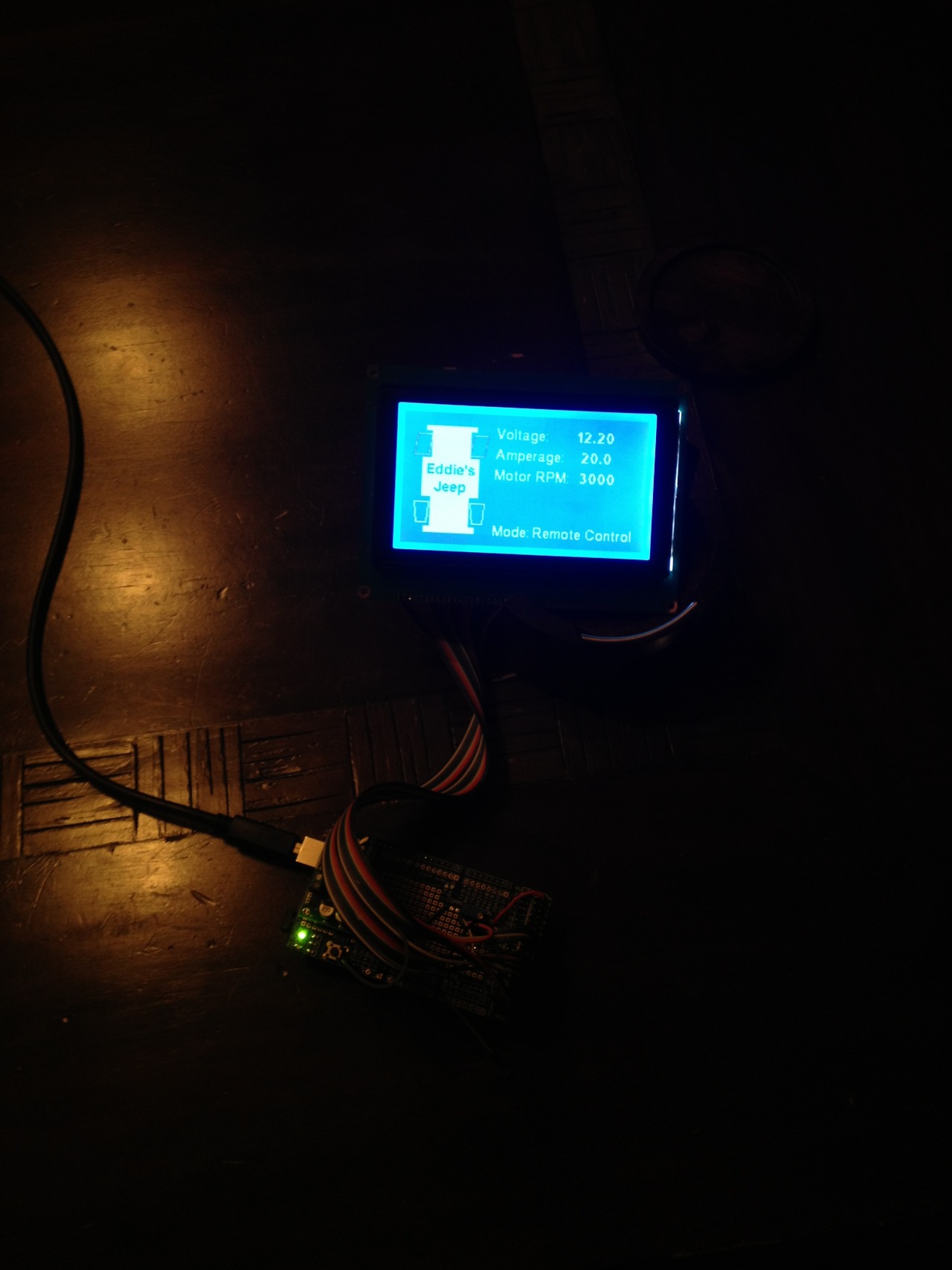
PWRover 2.0 - System underway! Renders Voltage, Amperage, RPM and Mode as well as a cool jeep icon with steering position and tapered wheels representing direction!

PWRover 2.0 - System underway! Renders Voltage, Amperage, RPM and Mode as well as a cool jeep icon with steering position and tapered wheels representing direction!
PWRover 2.0. I have started to build the 2.0 electronics for Project Power Wheels! I will be moving the controller in to the dash, this will shorten the wire runs for all the control components (steering, throttle, distance sensor and shifter). I am adding some serious bling to
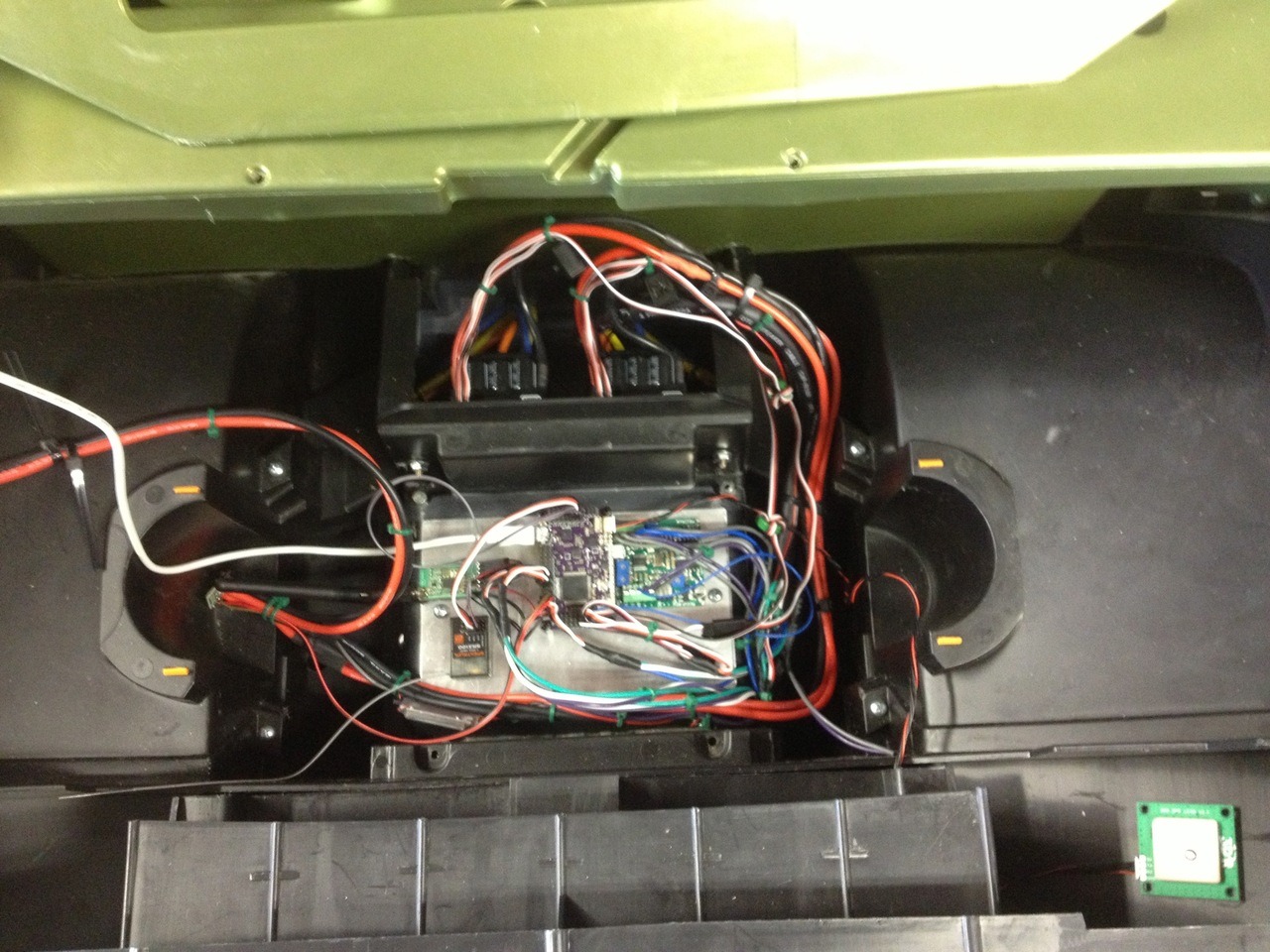
Version 0.1 wiring complete! APM2.5, Firgelli actuator controller, spektrum rc reciever, 900mhz telemetry, and wiring for headlights, steering wheel, throttle and IR distance sensor all done.
Easy on/off switch (with key) and usb socket for convenience in reprogramming!
Final Wiring
Main power switch and underside of USB
Project power wheels’ brain! APM2.5 (ardupilot), firgelli linear actuator controller, spektrum 3 channel receiver and 900mhz wireless telemetry.
APM2.5 is running completely new code written by me (last night) with 3 modes. Full RC, RC throttle + Jeep Steering wheel (via potentiometer and analog input) and full Jeep
Project power wheels, almost fully assembled.
Over the next few days I will be working on the code to run on the APM2. Last night I started a skeleton codebase, using the ardurover code to map the initial includes/setup and loop structure. But aside from the imported libraries and
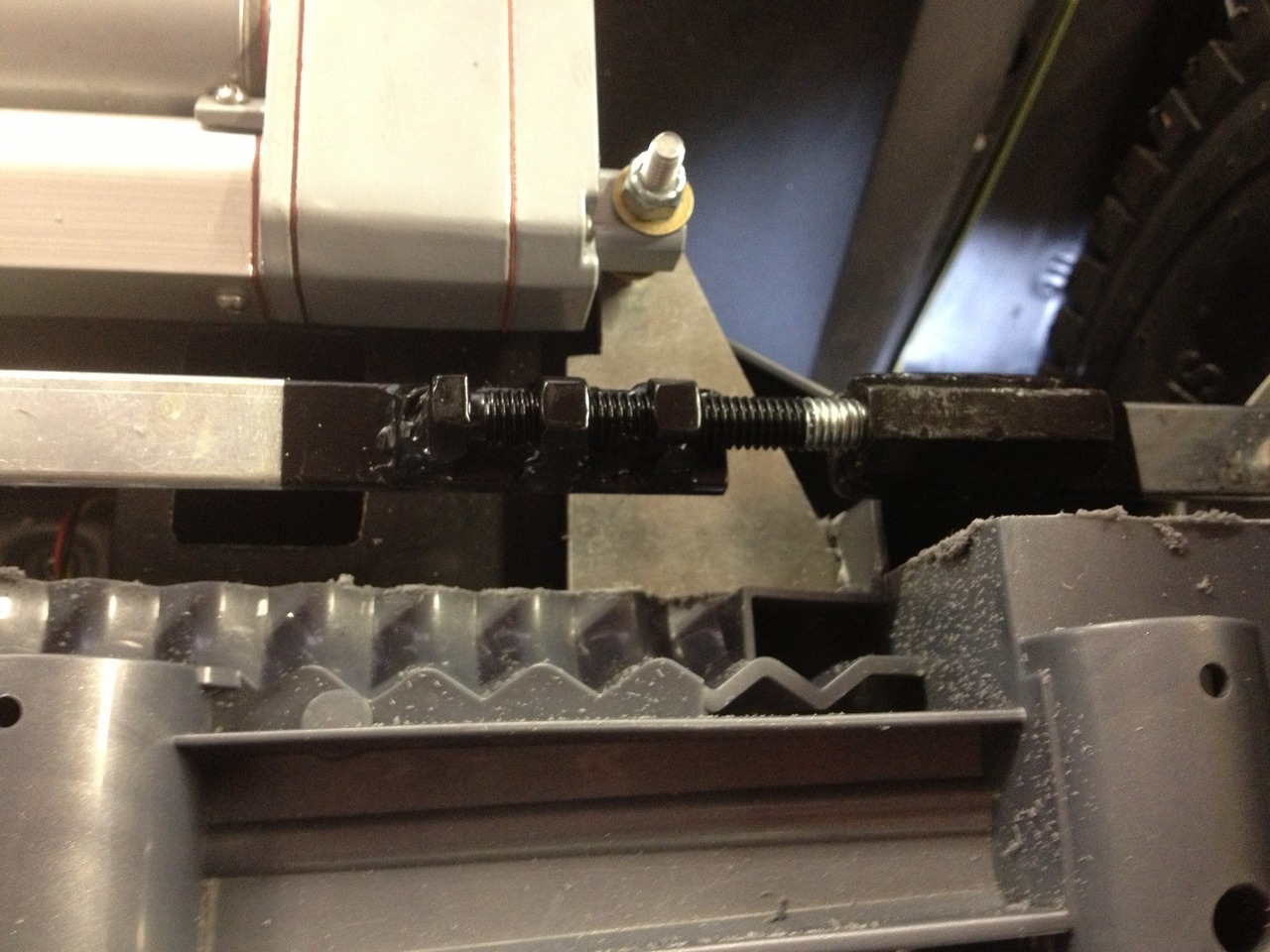
Steering buildout complete!
After much fussing with the frontend trying to get it to drive straight consistently we decided to make the drag link adjustable. Along with the aluminum plates and welded bolts to the front axels the frontend is now nice and stiff, and tracks great.


Last night i finished up the wiring and we got the APM2.5 mounted in the rear.
First iteration is just using a servo cable Y to the rear ESCs (just signal for second ESC), this will eventually become a separate output channel on the APM, and a signal cable

