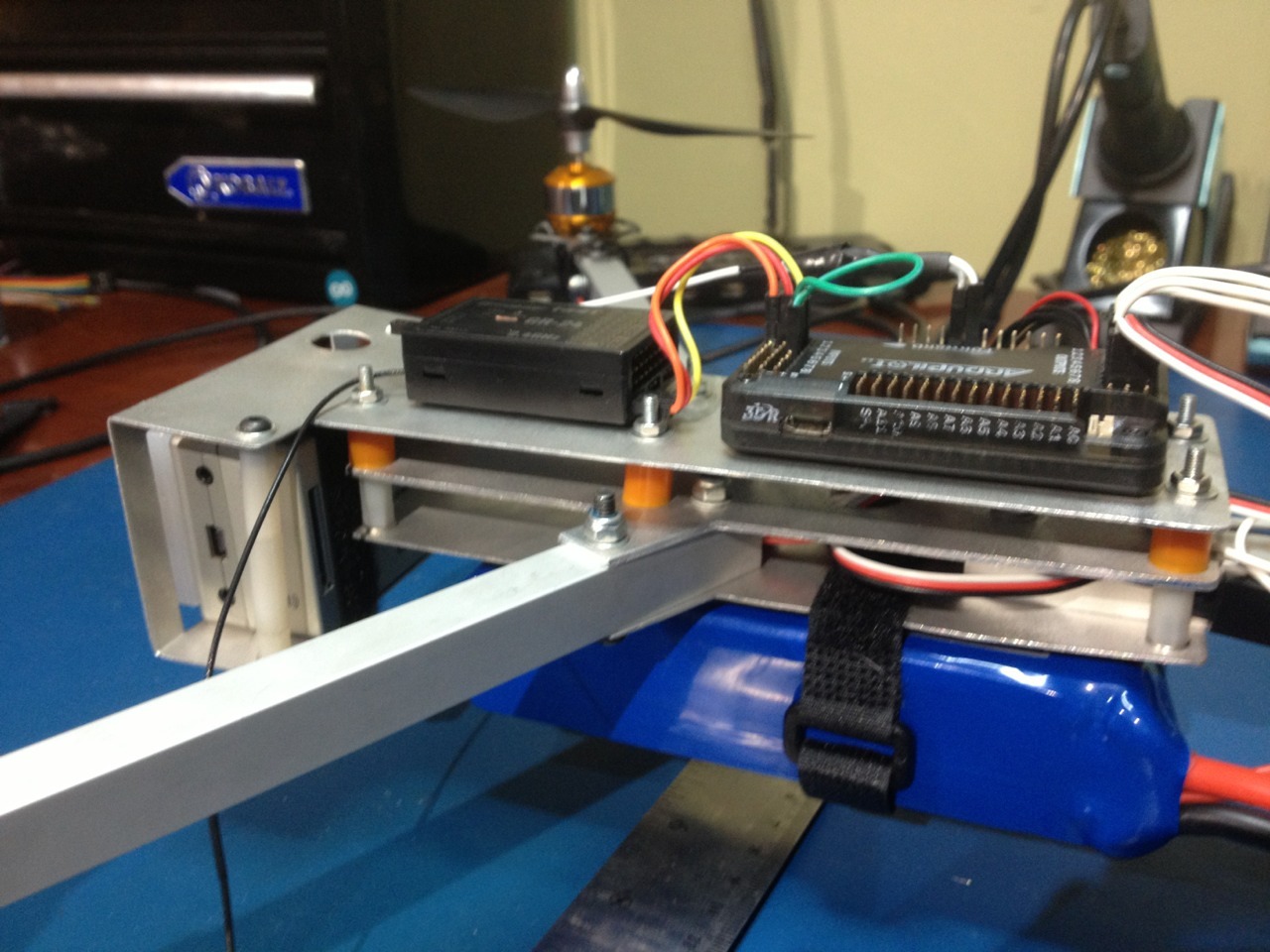
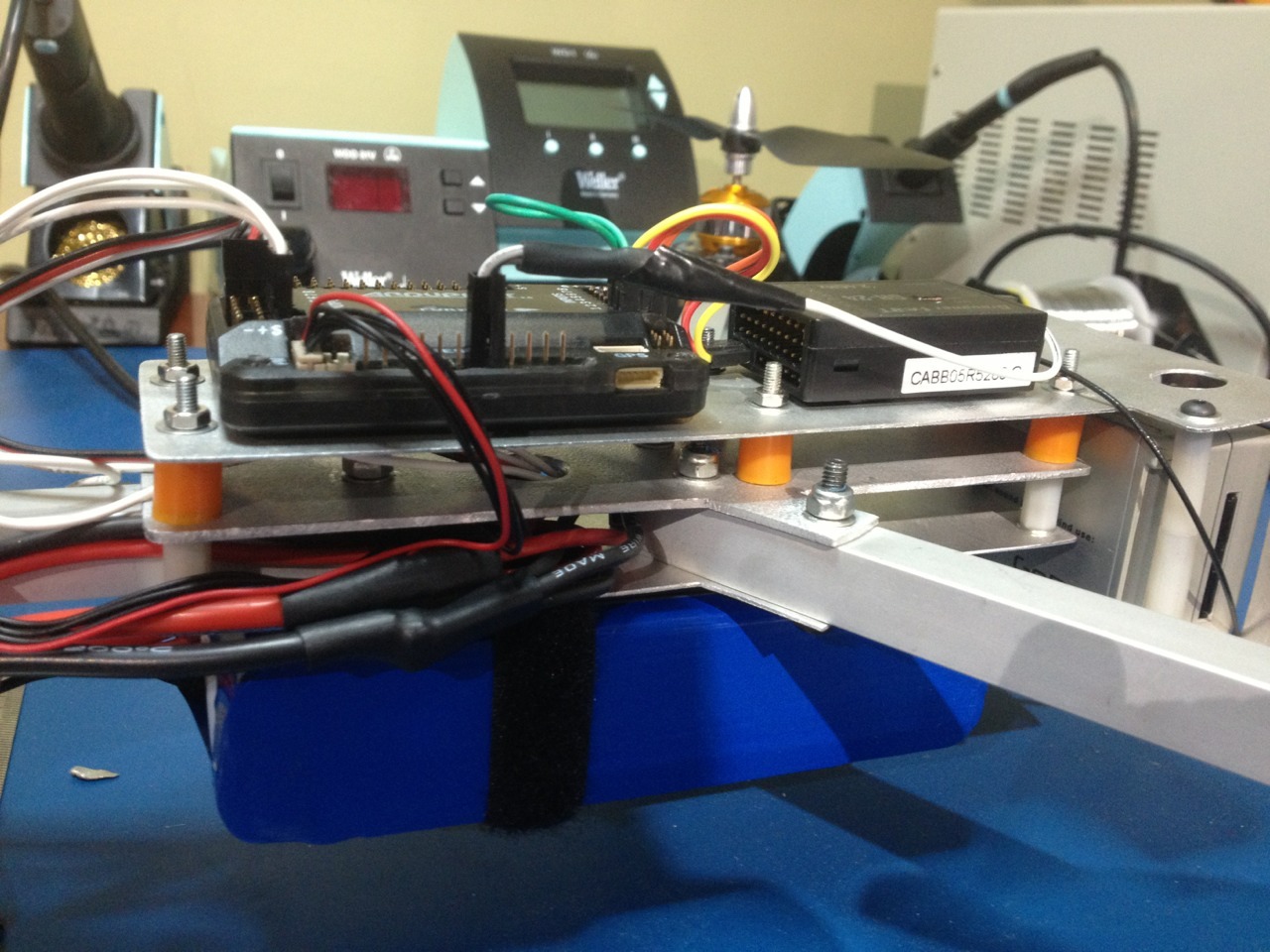
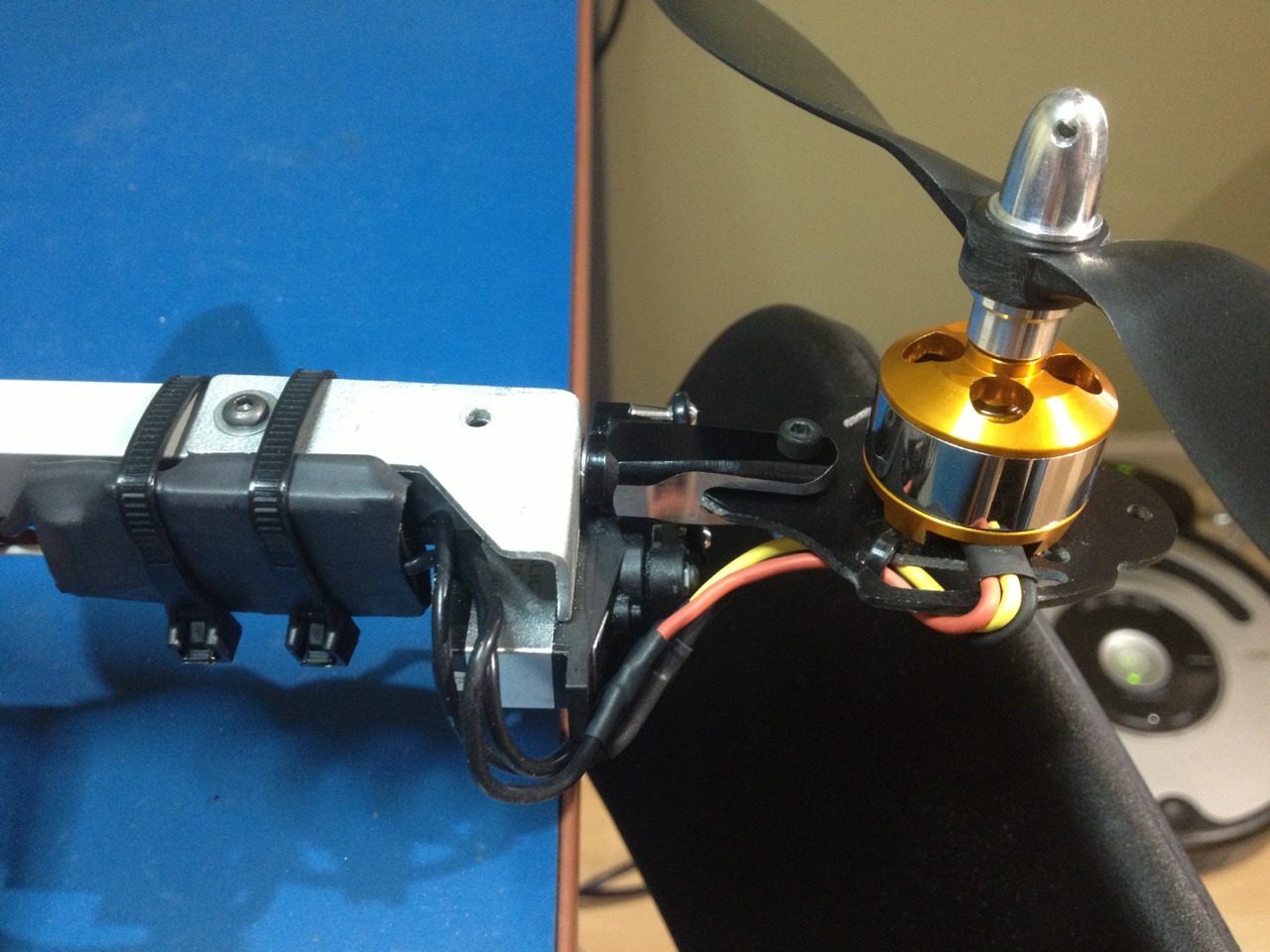
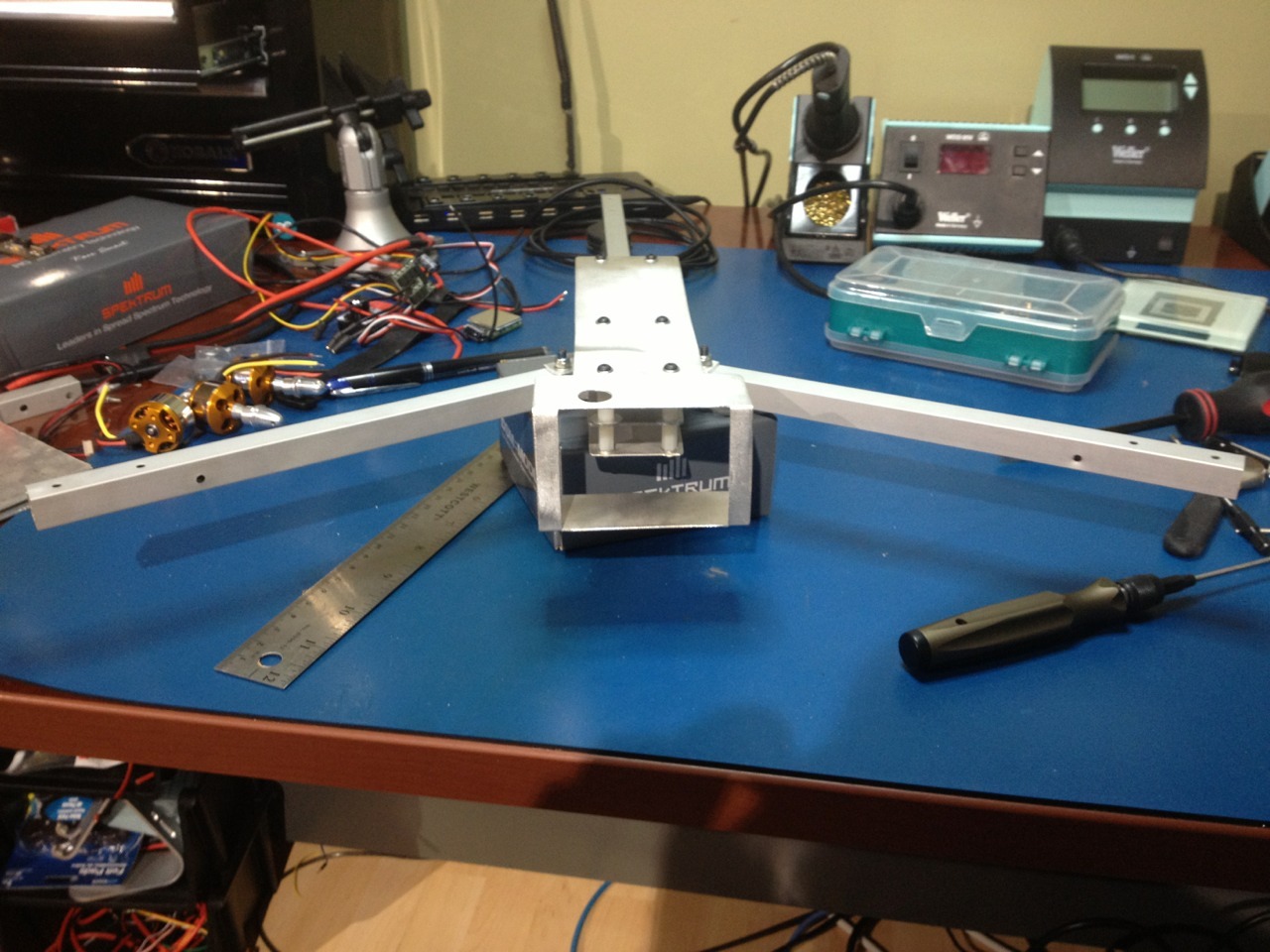
My Nexus 7 rc transmitter mount! I got a fantastic deal on a refurbished 2nd gen Nexus 7 on eBay. It’s main purpose will be running droidplanner for my multirotors! I just finished rebuilding my QAV500 with a 3DR Pixhawk, can’t wait to take it out for its
In
Starndard