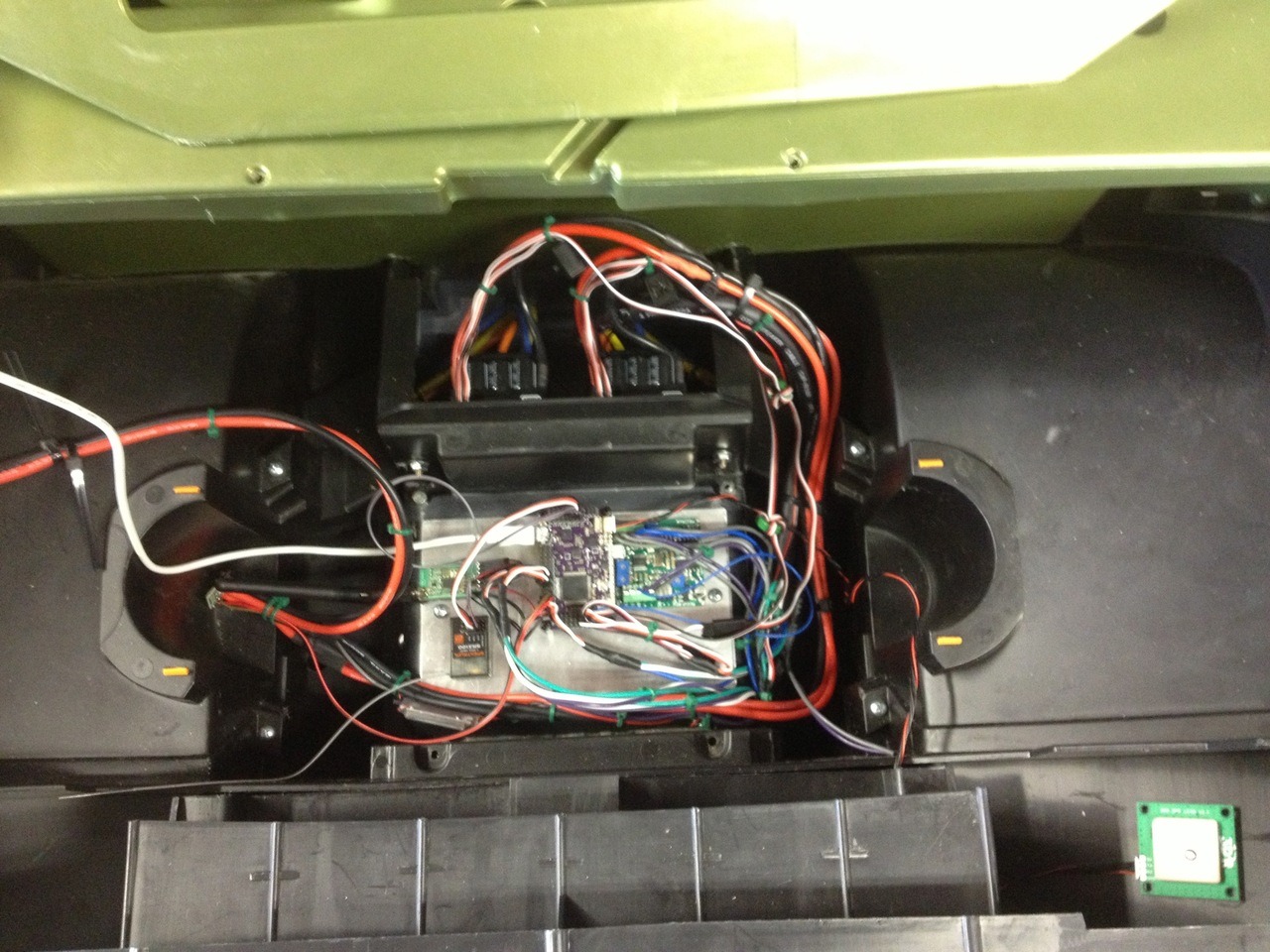
Project Dyson - I test fitted the electronics and everything seems to work/fit correctly. The arduino pro mini fits nicely in to the handle with all the wires squished in. The ESC + voltage/current sensor will be fit into the hollowed out battery housing. I will use velcro straps
In
Starndard